
Reconfigurable ROS based Resilient Reasoning Robotic Cooperating Systems
Project Code: 621447 R5-COP
Contract No: grant agreement no. 621447 / 2014
European manufacturing industry faces increasing requests for high product variance, small product series, shorter production cycles, and cost reduction. However, few robotic components are designed for easy adaptation and reuse. R5-COP focuses on agile manufacturing paradigms and specifically on modular robotic systems to overcome the shortcomings of existing solutions. We start by identifying and extending suitable existing methods and, where required, developing new ones to formally model hardware and software components. This approach will support model-based design, engineering, validation, and fast commissioning. Furthermore, using existing interface and middleware standards such as ROS, R5-COP will strongly facilitate integration of components from various suppliers. Such a modular approach will not only be more flexible than state-of-the-art solutions, but will also reduce design, setup, and maintenance costs. As flexible use of robots includes their close cooperation with humans, robustness and safety are crucial requirements which will be assured by dedicated verification and validation methodologies. The formal specification framework will support component suppliers in efficiently verifying and certifying their modules. This project will help to identify and develop reconfigurable key hardware and software components, and to show the feasibility and capability of the approach in living labs in manufacturing and service demonstrator environments.
About Us
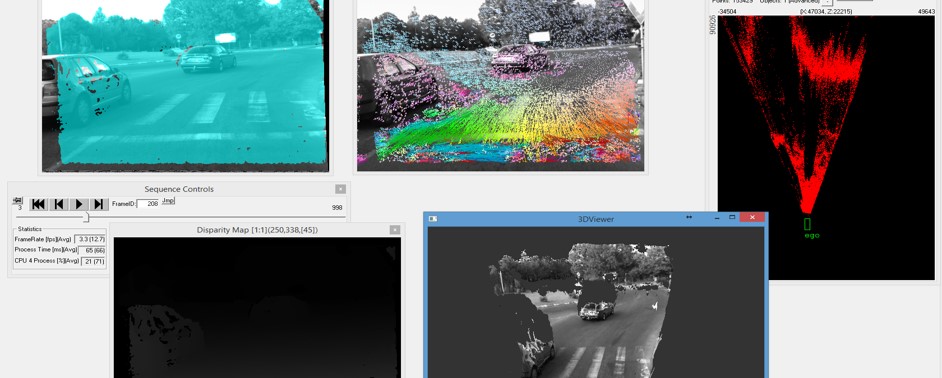
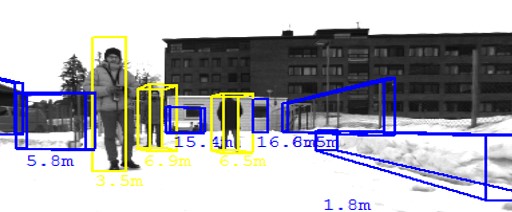
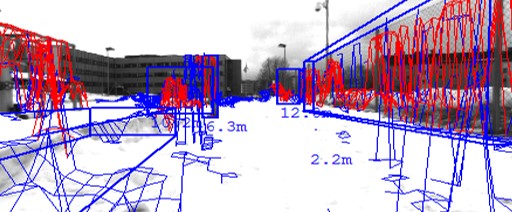
The Image Processing and Pattern Recognition Research Center is part of the Computer Science Department from the Technical University of Cluj-Napoca. Our main activities are research and teaching in the fields of image processing, pattern recognition, computer vision, hardware design for image acquisition and processing. We have reached state-of-the-art levels of expertise in the following directions: 2D and 3D Image Processing and Recognition Stereovision for Driving Assistance Systems and Autonomous Driving Medical Image Processing
IPPRRC Department