Home
A critical component within any SST system is the data processing chain, having as input data provided by a sensor (such as a telescope or a radar) and as main output orbit determination (OD) on which rely many services (object identification, collision avoidance, atmospheric re-entry, fragmentation, etc.). This is a huge field of research and technology development at international level addressing space infrastructure preservation. The project scope is to setup and test an original prototype of a real time data processing tool for automatic LEO space objects detection and their position determination having as input images provided by a very wide field of view (FOV) robotic optical SST instrument.
- The proposed data processing tool will contain a computing board and a software package both of them developed by Technical University of Cluj-Napoca (TUCN).
- BITNET CCSS (BITNET, partner in this proposal) will integrate the data processing tool developed by TUCN into one of its SST optical sensors and will test/validate the data provided by the data processing tool.
Team
From the Technical University of Cluj-Napoca, the project coordinator, the following key persons:
- Professor Radu Danescu - project manager
- Professor Florin Oniga - postdoctoral researcher
- Dr. Eng. Razvan Itu - postdoctoral researcher
- Eng. Mircea Paul Muresan - PhD researcher
The industrial partner of the project, BITNET CCSS, the following key members:
- Octavian Cristea - researcher/physicist
- Dr. Paul Dolea
- Dr. Vlad Paul Dascal
Workplan
The workplan of the project is organized in three phases, corresponding to the calendar years covered.
Phase 1: August 2020 – December 2020.
- Defining the architecture of the LEO detection system. Defining the architecture of the image processing system and the remote coordination application. Defining the hardware architecture, defining the hardware interfaces with the testing and validation system.
- Defining the architecture of the testing and validation system. Defining software components for testing and validation. Defining the hardware architecture and the location and operation methodology.
- Development of the image processing and object detection system, part 1 Development and partial optimization of the image processing system, preparation for implementation on the embedded architecture.
Phase 2: January 2021 – December 2021.
- Development of the image processing system and object detection, part 2. Development and final optimization of the image processing system, implementation on the embedded architecture.
- Development of interface components between observation systems and image processing system. Development of interfaces for adapting information from hardware components to processing algorithms. Development of software components for direct interface and control of hardware components.
- Development of remote control application for coordination of observations. Development of user interface and control components of the remote control application. Development of communication components of the remote control application.
- Defining the testing and validation methodology. Defining the testing and validation methodology.
- Integration of the SST image acquisition system and preliminary testing of operations. Integration of the SST system. Preliminary testing of operations.
- Dissemination of preliminary results. Elaboration and dissemination of scientific papers in international conferences and journals.
Phase 3: January 2022 – July 2022.
- Integration of system components. Software component integration. Hardware integration.
- Testing and validation through space observation campaigns. Assistance in the use of software systems in the observation process. Space observation campaigns.
- Dissemination and use of final results. Development and dissemination of scientific papers in international conferences and journals; Development and filing of a patent application.
Results

Figure 1. Acquisition and processing system: portable PC, DSLR camera, lens, synchronization device based on GPS (transparent box), radio communication device (black box).

Figure 2. Trajectories of the detected satellites from a sequence of images.
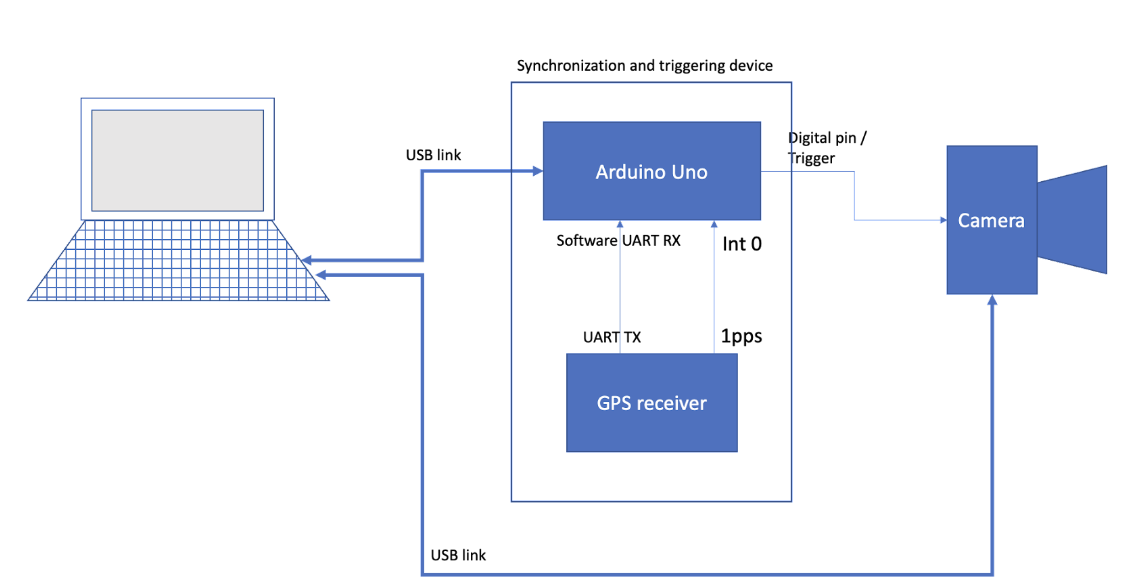
Figure 3. Hardware architecture of the acquisition and processing system.
Video: complete system.
Publications
Oral presentation:
R. Danescu, R. Itu, M.P. Muresan, V. Turcu, O. Cristea, "Compact Solution for Low Earth Orbit Surveillance", Viewpoints in Astronomy, Astrophysics, Space and Planetary Sciences, October 28-29, 2021, parte a evenimentului "Zilele Academice Clujene 2021".
Conference paper:
R. Danescu, R. Itu, M.P. Muresan, V. Turcu, O. Cristea, "Compact Solution for Low Earth Orbit Surveillance", IEEE Intelligent Computer Communication and Processing, Cluj-Napoca, 28-30 October, 2021.
Journal paper:
Radu Danescu, Razvan Itu, Mircea Paul Muresan, Ana Rednic, Vlad Turcu, "SST Anywhere—A Portable Solution for Wide Field Low Earth Orbit Surveillance", Remote Sensing, Vol. 14, No. 8, 2022, Art. No. 1905.
Reports
The project reports will be published here.
Phase 1 report.
Phase 2 report.
Phase 3 report.
Final report.
Contact
Radu Danescu
Address:
Technical University of Cluj-Napoca
Computer Science Department,
Str. Memorandumului, Nr. 28, 400 114, Cluj Napoca
Romania
Office: Baritiu str. 26, room 37
Phone: +40 264 401457
E-mail:
Radu.Danescu@cs.utcluj.ro
Full project name:
CAMELEON - Compact image Acquisition and position MEasurement system for targets in the LEO raNge
Contract:
PN-III-P2-2.1-PED-2019-4819
Funding:
Ministery of Research and Innovation, CNCS – UEFISCDI